
Safety for maintenance-of-way vehicles and workers
Rail safety is the core of what we do at LILEE Systems and as we discussed in Safety Vulnerability Remains after PTC, the job is not done with the PTC implementation at the end of 2020. Our culture of safety continues and expands to maintenance-of-way (MOW) vehicles to prevent incidents, further ensuring rail safety while driving productivity and efficiency and supporting the trend towards Precision Scheduled Railroading.
Positioning accuracy matters
Positioning accuracy is an essential ingredient of LILEE’s MOW Collision Avoidance Solution. When a track authority for a work zone is given to a maintenance vehicle, the sub-division name, track ID, and milepost range are assigned to the authorized vehicle. This allows the authorized vehicle to enter only the authorized track sections. However, in most cases, there are multiple parallel tracks at the location where a vehicle will be entering its authorized section of track. The accuracy in the location report in this scenario becomes very important as an error in the position report can result in collisions if the maintenance vehicle is allowed to enter incorrect track sections without a warning. Or, in the opposite case, the system can generate unwanted warnings when the maintenance vehicle is operating on its authorized section of track.
LILEE's MOW Collision Avoidance Solution includes a high precision positioning hardware which takes advantage of the location data from the multi-band (L1, L2, L5) GNSS with RTK (Real Time Kinematic), the IMU, and the vehicle CAN bus inputs (direction, throttle, speed, etc.). The built-in sensor fusion software then provides a combined positioning accuracy of 0.01 m + 1 ppm CEP. This capability enables the solution to perform track discrimination with a confidence level exceeding 99.9%, eliminating human errors associated with legacy systems which only rely on the driver to input the track information (thumbwheel for track identification) manually.
What about positioning in extreme conditions?
SLAM (Simultaneous Localization and Mapping), a method used for robotics and autonomous vehicles, can also be used in the scenario where the positioning satellite signals are not available. SLAM technology is used to estimate the position of a vehicle and then map the environment at the same time. This same technology can be equipped on a MOW vehicle to allow the vehicle to continuously and accurately localize (position) itself even when operating in extreme weather conditions, tunnels, or underground environments where the positioning satellite signal is not reliable or available. This design allows each vehicle to continue to obtain its position and generate proximity and authority limits alerts using this location input.
Object detection for rail safety
However, positioning with the best accuracy does not provide the capability for MOW vehicles to see obstacles like a portable derail, track signs, mile markers, absolute signals, etc. LILEE leverages the knowledge and experience from autonomous driving for obstacle detection functionality.
LILEE’s object detection mechanism combines cameras and LiDAR — sensors to provide depth (object distance) sensing. This combination of sensors provides 3D depth measurements of the surrounding of the vehicle, and the results of these measurements are saved in a point cloud data. As shown in the diagram below, each tiny yellow/orange dot in the diagram represents a measure in the 3D space.
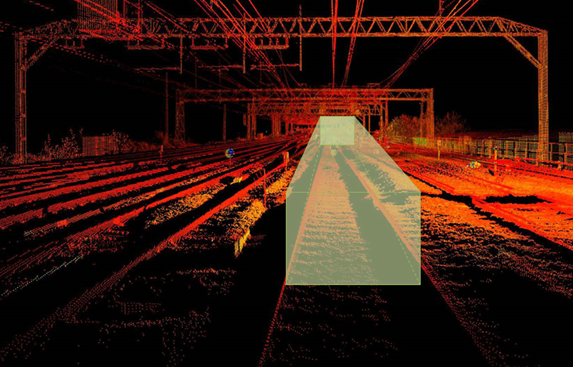
Figure 1 A Conceptual View of the 3D Safety Zone
The point cloud data from sensors and the vehicle’s current position is used establish a 3D safety zone (or a 3D safety tunnel) in front of the MOW vehicle based on the profile of the rail track and track map as well as the size of the MOW vehicle.
If this safety zone is clear of any obstacles, the system will consider the path in front of the vehicle as safe to proceed. The 3D safety zone will continuously be re-computed in real time as the vehicle moves forward or changes its position to ensure safety.
Depending on the type of sensor used, the maximum distance (or the depth) of the 3D safety zone can range up to 500 feet. This distance is also dynamically adjusted based on the MOW vehicle’s speed, so when the vehicle speed is high, the depth of the safety zone will be increased to accommodate for the longer braking distance.
On the other hand, if the vehicle speed is low, the braking distance required will also be reduced, and the corresponding safety zone will be reduced to avoid false positive scenarios.
Whenever an object falls into this 3D safety zone, the object will be considered as an obstacle for that vehicle. In this example, a MOW vehicle on the left side getting too close to the vehicle on the right will be considered as an obstacle. Consequently, a warning will be generated to inform the driver of the vehicle on the right side.
Similarly, when a boom on the MOW vehicle on the adjacent track extends too far out into the safety zone of another MOW vehicle, it will also be considered as an obstacle. A warning will be generated to inform the driver of the upcoming danger.
Additional objects can be detected by retraining the AI algorithms. As with all AI-based technologies, image data collection and object labeling are essential parts of enhancing the AI capability and accuracy. Our big data capabilities with image collection can quickly retrain and enhance AI algorithms to improve existing functionality and to add new functionality.
The most advanced position tracking and object detection
The LILEE Systems MOW Collision Avoidance Solution keeps trains and MOW vehicles safe with ultra-high positioning accuracy and the latest AI-based object detection technology, creating a new standard for rail safety.
To learn more about keeping your maintenance-of-way vehicles safe, please contact yjlee@lileesystems.com.
